




关键词:高速流 航道检测
近日,国家重点研发计划项目“内河航道设施智能化监测预警与信息服务”在长江泸州航道局江阳航道处辖区冰盘碛水道和神背嘴水道开展应用示范。深之蓝高速流航道检测水下机器人作为该项目重要子课题,与无人机、无人船、浮标监测及自动复位装备、复杂流态监测系统、坝体侵蚀三维层析扫描系统、航槽演变过程智能监测系统、航道抛石整治建筑物外部变形智能监测系统共同完成现场测试,通过了对航标、整治建筑物等内河航道设施进行无人监测和在线监测的效果验证。
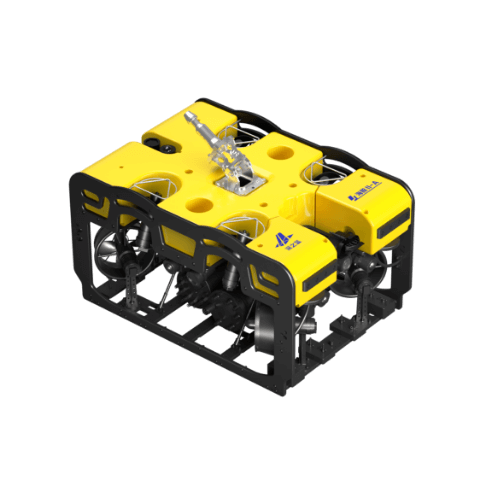
传统水下机器人采用开放框架式结构,具有兼容性强,可搭载多种探测附件的优势。缺点是阻力系数高,潜水过程中无法快速移动。深之蓝技术团队将水下机器人外形优化为扁平流线型结构,大大降低阻力系数。创新性地采用自动缆轴协同控制技术、动力定位技术,同时安装可调的观察底座、集成多种定位传感器,大大提高水下机器人载体航速、抗流稳定性、载体的水下定位精度等指标,通过BV5000、DVL、惯导、USBL、M900声呐、三维成像声呐等采集建筑物细部信息。结合提前布设的岸坡监测仪器,可进行岸坡内部变形信息采集。进行水上水下岸坡内部信息拼接与数字化重构,实现内河航道设施服役状态快速采集信息全方位立体化呈现。

扬州仪征长江航道自主抗流
此前,该型设备在扬州仪征长江航道内经过高速流测试,现场水流速度在2-3米/秒左右。水下机器人开启自主抗流功能,可完全抵抗长江航道内水流对设备的冲击。
长江泸州段应用示范现场——水下机器人沿坝前行
长江泸州段应用示范现场——水下机器人返回

水下机器人扫描长江沿岸坡坝结构
据负责示范应用工作的项目组成员张明进博士介绍,本次示范应用选择长江四川泸州段,一方面是由于长江泸州航道局高度重视科技创新,积极致力于运用现代先进的技术和装备全力提升航道维护的信息化、智能化水平;另一方面长江泸州航道局江阳航道处在打造现代化航道维护示范处方面已经取得一些成绩,拥有良好的应用基础,在此进行应用示范,可相互借鉴交流。同时,该段航道滩险众多、弯曲狭窄、条件复杂,具有典型的山区航道特征,辖区内助航标志、整治建筑物种类齐全,在此开展应用示范有利于项目后续推广。
点击阅读原文了解来自长江航道的报道