




水工隧洞是水利工程中常见的一种输水道,长期运行可能存在各种运行隐患。巡视检查在水工隧洞安全监测与管理中十分重要,隧洞巡检的工作量巨大,任务繁重。
水下机器人可以在水中长时间工作,不受周围环境(阴暗、潮湿、无氧)的影响,且可与岸上人员实时进行信息分享,已经成为水利工程检测的新宠。为了掌握整个检测过程中的情况,水下机器人的定位非常重要。常用的水下定位方法为惯性导航系统(INS,以下简称INS)和声学多普勒测速仪(DVL)组合定位方法。但是由于INS和DVL都存在测量误差,且位置是测量的速度量的积分,导航定位误差会随着时间和航程的增加出现漂移,无法满足高精度定位的需求。
深之蓝技术团队经过大量现场调研及测试工作,利用输水管道中常有一些建筑结构特征,比如管道连接缝、线槽等,通过图像声呐“观察”这些特征,再结合人工智能算法,进行提取和分析,进一步自动对已有定位进行修正,从而实现高精度的导航定位。解决了水下机器人在长隧洞中难发挥作用的难题。同时贴合用户实际场景需要,形成为长隧洞专用检测方案,包括:
- 长隧洞专用ROV检测平台
- 恒张力自动收放缆轴
- 集成化控制站
- 一体化转运车
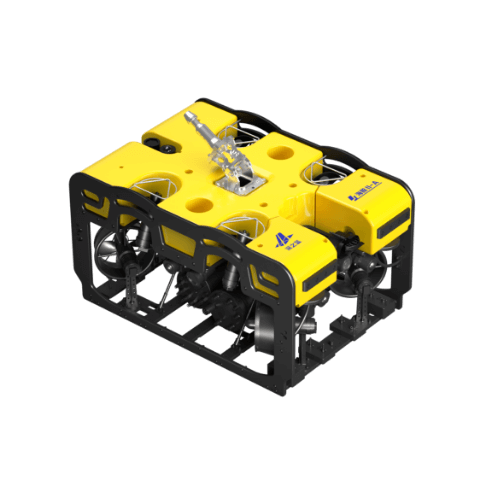
| 01长隧洞专用ROV检测平台 | |
 | ✅8推进器布置,全姿态的调节能力 ✅内置导航舱,结合软件实现水下机器人精确定位及自动驾驶 ✅工作深度可定制150~1000m,覆盖隧洞检测工作场景 ✅4×10000lm 泛光LED灯,拍摄区域光照均一 ✅4轮驱动,方便转移、布放 ✅兼容多类型传感器,完成长隧洞的全范围检测 多波束前视声呐 3D扫描声呐 管道声呐等 机械手、钢丝刷,便于完成表面障碍物的清除 |
| 02恒张力自动收放缆轴 | |
 | ✅可内置长达6km 脐带缆,适应长隧洞场景 ✅自动放缆/回收,解放双手,提升效率 ✅深之蓝自研发软件系统,可设置拉力、速度 ✅恒张力状态线缆长度随机器人运行距离自动调节,避免绕缆 |
| 03集成化控制站 | |
 | ✅分布式可扩充架构,强大处理能力 ✅内置GPU 加速,支持神经网络加速计算 ✅长隧洞检测专用软件系统,实现水下机器人在隧洞中的自动驾驶、自动检测 ✅多界面显示系统,支持水下摄像机、声呐、运动控制等多路信息同时输入输出 ✅所有控制系统集成在车中,便于人员在野外艰苦条件下(暴晒多雨)长时间作业。并可根据任务要求高效快速转移工作阵地 |
| 04一体化转运车 | |
 | ✅平台轻松布置,超高工作效率 ✅C1驾照可驾驶,符合国六排放标准 |
扫描以下二维码,
告诉我们您希望水下机器人
帮助解决什么问题